我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。
老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:
“屏蔽力是信息过载时代一个人的特殊竞争力,任何消耗你的人和事,多看一眼都是你的不对。非必要不费力证明自己,无利益不试图说服别人,是精神上的节能减排。 无人问津也好,技不如人也罢,你都要试着安静下来,去做自己该做的事.而不是让内心的烦躁、焦虑、毁掉你本就不多的热情和定力。”

文章大体有如下内容:
1、前言
2、域集中到中央集中,集成度不断增加下传输及算力要求同步提高
3、区域集中架构在进一步将功能集成的同时可显著减少线束成本
一、前言
汽车行业是一个重资产、多交互的行业。伴随接触多部门,越发认为汽车内架构及线束随着功能的拓展越来越复杂。
-> 1、一方面空调、车机及部分监管要求导致的功能增加和机械到电子的发展趋势使得线缆、连接器等用量成倍增长;
-> 2、另一方面,新能源和智能网联的新浪潮也催生了新的复杂度。
“车内通信架构呈现分布式-域集中-区域集中-中央/车辆集中的发展趋势”
电子电器架构(EEA)相当于汽车电子电器系统的总布置。它是在功能需求、法规和设计要求等特定约束下,通过对功能、性能、成本和装配等各方面进行分析,所得到的最优的电子电器系统模型。
汽车发展至今,已不仅仅是代步工具,更是具备安全、舒适、娱乐等性能的集合体。而实现这些配置的正是不同的电子器件。电子电器对整车空间、功能、性能、成本、装配、开发周期等各方面都有更高更复杂的要求,传统的原理及线束设计已经远远不能满足。而且随着汽车行业平台化和模块化的发展,整车电子电器的开发也必须遵循一定的次序和规则,顺应汽车行业和企业自身发展方向。
这种趋势的背后是车载网络正在从域架构向区域架构迁移。域架构将车辆划分为更易于管理和灵活的区域,但实现这一目标需要时间。当今的汽车中有太多的传统技术,汽车制造商必须支持一系列协议,如蓝牙、USB、LTE等。这种复杂性导致了向更简单、更高效的通信架构的转变。
在分布式阶段,每个功能对应一个ECU(电子控制单元),这导致了大量的布线和复杂性。然后,随着技术的发展,汽车制造商开始将功能相似的ECU集成到域控制器中,形成了域集中阶段。在这个阶段,车辆被划分为几个域,如动力域、底盘域、车身域、信息娱乐域和ADAS(高级驾驶辅助系统)域。
接下来是区域集中阶段,这个阶段进一步简化了车辆的通信架构。在这个阶段,相邻的域被组合成一个更大的区域,这减少了车辆中的协议和布线的数量。
最终,中央/车辆集中阶段将实现车辆中所有功能的集中控制。在这个阶段,一个强大的中央计算机将负责处理所有的传感器输入和执行所有的控制功能。这将使汽车制造商能够更轻松地添加新功能并更新软件,同时也将提高车辆的性能和安全性。

博世将电子电器架构发展划分为分布式-域集中-车辆集中三个阶段。2010年来智能化和网联化新需求催生电子电器架构不断创新,2025年区域控制将普及。
相比传统的分布式总线架构,未来的汽车E/E架构将由数量更少但功能更多更强、集成度更高的ECU/DCU组成,降低架构复杂度并提升可拓展性,目前领先的已量产主流车型已达到域集中的架构。域集中指将功能相近的ECU集成到一个域控制器(DCU/Domain Control Unit)上进行控制。目前在汽车行业得到广泛认同的五域划分为: 辅助及自动驾驶域、信息娱乐(显示、娱乐和信息系统)域、车身&舒适域、底盘连接域以及动力总成(推进和废气处理)域,但主机厂依据自己的选择可选择划分为3个域、4个域。

随着自动驾驶等级的提升和功能的增加,车内架构将进一步演化,域与域之间会进一步融合,计算资源将被集中到中央计算平台上,功能域被按空间划分的区域代替。 E/E最终的形态是云化,在满足低时延、高传输速度和高可靠性的条件下将功能服务放到云端运行。
域集中架构将功能相近的ECU集成到域控制器(DCU),可减少ECU和线束数量,更加具有成本效率。 分布式架构下,一家大型汽车OEM的支持三种不同引擎的发动机控制器软件可能会有144 个软件/校准版本; 而在集中式或面向域的体系结构下,由域控制器托管控制器功能的主要部分,以及一个非常简单的智能执行器,仅需要捕获硬件可变性(不同引擎之间的差异和底层硬件平台之间的差异),就能够使得域控制器的版本数减少到72个,智能执行器的版本减少到3个,总软件版本数量减少到75个。
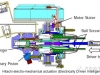
区域集中架构在进一步将功能集成的同时可显著减少线束成本。
域集中架构虽然能够降低 ECU 的数量,但由于其本质为功能的集成,而一些功能如动力、底盘遍布车身各处,集成后仍需要线束连接DCU和散布在车身各处的执行器,并不能有效解决汽车线束快速增多的痛点。而区域集中架构将空间上临近的功能集成到ZCU/Zone上,使得区域控制器与传感器、执行器的空间距离大大缩短,从而能够显著减少所需线束。
汽车的线束成本占比约15%-20%,其中人力成本占50%,而区域控集中架构可减少线束成本15-20%。与域集中架构不同的是,域控制器具有决策权,而区域集中架构下的决策权在中央计算单元/高性能计算平台(HPC)手中,其具备高算力资源,能够处理大数据量的复杂任务并实现对区控制器的资源分配和任务调度等功能。

DCU/ZCU 的集成对于通信带宽也提出了更高的要求。ECU集成为DCU/ZCU意味将从前多个ECU 所需处理的数据交给一个控制器处理,对算力和传输速率要求提升,自动驾驶也需要每时每刻感知外部环境并传输图像、点云等数据, 整体对于车内通信速率的要求大幅提升。据麦肯锡估计,未来自动驾驶汽车中会达到4TB/h的数据传输。 传统总线技术中,目前最大带宽的MOST150也只能支持150Mbps的数据传输速度,远远达不到自动驾驶的数据吞吐要求。

对车厂而言,集中式/集成式的架构相比分布式架构在技术实现上更有难度,但可拓展性强,发展前景更好。集中式的架构下功能更强大的域控制器、 区域控制器技术含量更高、软硬件要求都有较大提升;同时也会使得车内网络更加简单,让车厂能够以较小的成本实现客户越来越多的功能需求。
对应车内通信架构的发展趋势对汽车行业有着深远的影响:
-> 1、车内通信架构的发展将推动汽车安全性的提升。通过实现智能安全功能,如自动紧急制动和自动驾驶,以及智能导航功能,可以减少交通事故的发生,提高驾驶者的安全性和舒适度。
-> 2、车内通信架构的发展将使汽车变得更加便捷。通过实现车载通信技术,驾驶者可以更加轻松地找到目的地,享受个性化的驾驶和娱乐体验。这将提高汽车的便捷性和舒适性,增强消费者对汽车的满意度。
-> 3、车内通信架构的发展还将推动汽车行业的技术创新。随着智能化和网联化技术的不断发展,汽车行业将面临新的挑战和机遇。车企需要不断投入研发,提升技术实力,以适应市场需求的变化。
-> 4、车内通信架构的发展还将影响汽车行业的产业链和商业模式。随着智能网联汽车的发展,产业链和商业模式将发生变革,包括电池技术、充电设施、智能交通系统等方面。车企需要与供应商、经销商等合作伙伴紧密合作,共同推动汽车行业的可持续发展。
车内通信架构的最新科技包括以下几个方面:
-> 1、车载以太网技术:以太网技术以其高带宽、低延迟和低成本的优势,正在成为车内通信架构的首选技术。车载以太网技术可以实现车内各个设备之间的高速数据传输,满足日益增长的数据传输需求。
-> 2、5G通信技术:5G通信技术具有高速率、低延迟、大连接数等特点,为车内通信架构提供了更加高效的数据传输能力。通过5G通信技术,汽车可以实现与云端、其他车辆和基础设施的实时通信,实现车联网(V2X)的互联互通。
-> 3、C-V2X通信技术:C-V2X(Cellular Vehicle-to-Everything)是一种基于蜂窝网络的通信技术,可以实现车与车、车与基础设施、车与行人之间的实时通信。C-V2X技术为自动驾驶和智能交通系统提供了更加可靠的通信保障。
-> 4、软件定义汽车(SDV):软件定义汽车是一种新型的汽车设计理念,将汽车的控制逻辑和功能通过软件进行定义和实现。通过SDV技术,汽车可以实现更加灵活的功能配置和升级,提高汽车的智能化水平。
-> 5、车载云计算技术:车载云计算技术将云计算技术应用于汽车领域,通过车载终端与云端服务器的实时通信,实现数据的存储、处理和分析。车载云计算技术可以为汽车提供更加丰富的智能化服务和应用。
-> 6、车载人工智能(AI)技术:车载AI技术通过深度学习、机器学习等算法,对车内传感器数据进行处理和分析,实现智能驾驶、智能安全等功能。车载AI技术可以提高汽车的智能化水平和自主决策能力。
搁笔分享完毕!

愿你我相信时间的力量
做一个长期主义者!
|